Un nouveau paradigme pour l’intelligence robotique décentralisée
Pendant des décennies, les robots étaient cantonnés à des tâches répétitives, principalement dans des environnements industriels structurés. Aujourd’hui, l’intelligence artificielle (IA) révolutionne la robotique : elle permet aux robots de comprendre et d’exécuter des instructions humaines, tout en s’adaptant à des contextes dynamiques.
Nous entrons dans une ère de croissance fulgurante : selon Citi, 1,3 milliard de robots seront déployés dans le monde d’ici 2035, bien au-delà des usines, pour investir les foyers et les services. Parallèlement, Morgan Stanley anticipe que le secteur de la robotique humanoïde pourrait atteindre 5 000 milliards de dollars d’ici 2050.
Si cette expansion spectaculaire ouvre un potentiel de marché inédit, elle soulève aussi des enjeux majeurs : centralisation, confiance, confidentialité et passage à l’échelle. Les technologies Web3 représentent des solutions transformatrices, favorisant des réseaux robotiques décentralisés, vérifiables, collaboratifs et respectueux de la vie privée, capables de relever ces défis.
Dans cette édition, nous analysons la chaîne de valeur de la robotique IA, en mettant l’accent sur les robots humanoïdes et sur les opportunités exceptionnelles suscitées par la convergence entre IA robotique et Web3.
Chaîne de valeur de la robotique IA
La chaîne de valeur de la robotique IA repose sur quatre couches essentielles : matériel, intelligence, données et agent. Chacune d’elles s’imbrique pour permettre aux robots de percevoir, raisonner et agir dans des environnements complexes et réels.
Récemment, la couche matérielle a connu des avancées notables, portées par des pionniers tels que Unitree et Figure AI. Toutefois, des défis persistent pour les autres couches : manque de jeux de données de qualité, absence de modèles fondamentaux universels, faible interopérabilité entre incarnations robotiques et nécessité d’infrastructures informatiques de périphérie robustes. C’est dans les couches intelligence, données et agent que se trouvent les principales opportunités d’innovation.
Couche matérielle : « Le corps »
La construction et le déploiement de « corps de robot » modernes sont désormais accessibles. On recense plus de 100 modèles humanoïdes disponibles, dont Optimus (Tesla), G1 (Unitree), Digit (Agility Robotics), Figure 02 (Figure AI).
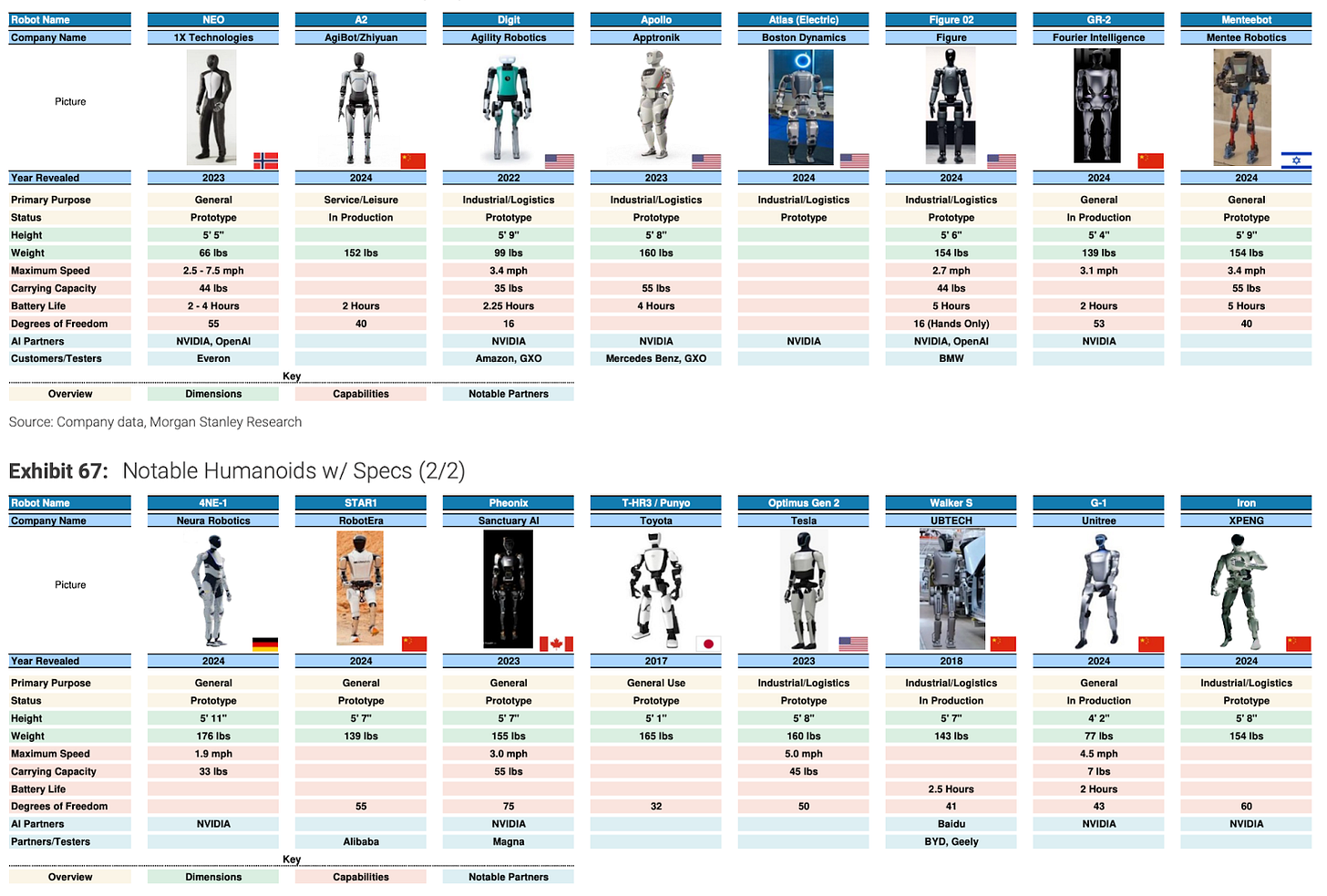
Source : Morgan Stanley, The Humanoid 100 : Mapping the Humanoid Robot Value Chain.
Trois composants clés stimulent cette évolution :
- Actionneurs : Véritables « muscles » du robot, les actionneurs transforment les commandes numériques en mouvements précis. Les moteurs électriques haute performance apportent rapidité et précision, tandis que les actionneurs diélectriques élastomères (DEA) permettent des manipulations fines. Cette dextérité s’observe sur des modèles tels qu’Optimus Gen 2 (Tesla, 22 degrés de liberté) et G1 (Unitree), offrant une agilité proche de celle de l’humain.
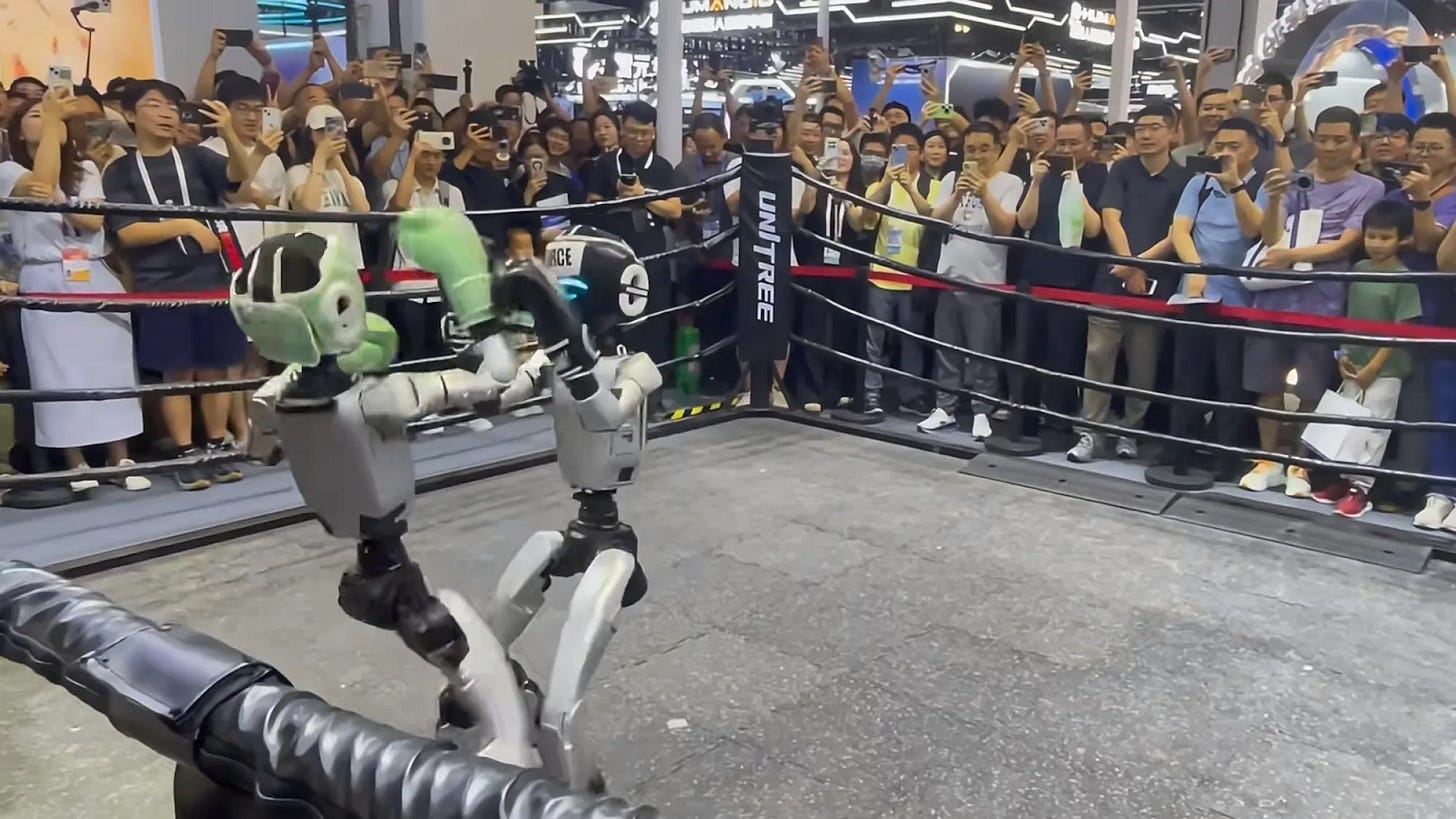
Source : Les plus récents robots humanoïdes Unitree en démonstration de boxe au WAIC 2025
Capteurs : Les capteurs de nouvelle génération permettent aux robots de percevoir et d’analyser leur environnement à travers la vision, le LIDAR/RADAR, le toucher ou l’audio. Ils assurent une navigation sûre, une manipulation précise et une bonne compréhension des situations.
Informatique embarquée : Les CPU, GPU et accélérateurs IA (TPU, NPU) embarqués traitent les données des capteurs en temps réel et exécutent des modèles d’IA pour une prise de décision autonome. Une connectivité fiable et à faible latence garantit la coordination, et les architectures hybrides périphérie–cloud permettent de déléguer les calculs lourds.
Couche intelligence : « Le cerveau »
À mesure que le matériel s’affine, l’enjeu devient la conception d’un « cerveau » robotique : des modèles fondamentaux robustes et des politiques de contrôle avancées.
Avant l’IA, la robotique reposait sur l’automatisation par règles et des mouvements préprogrammés, sans véritable intelligence adaptative.
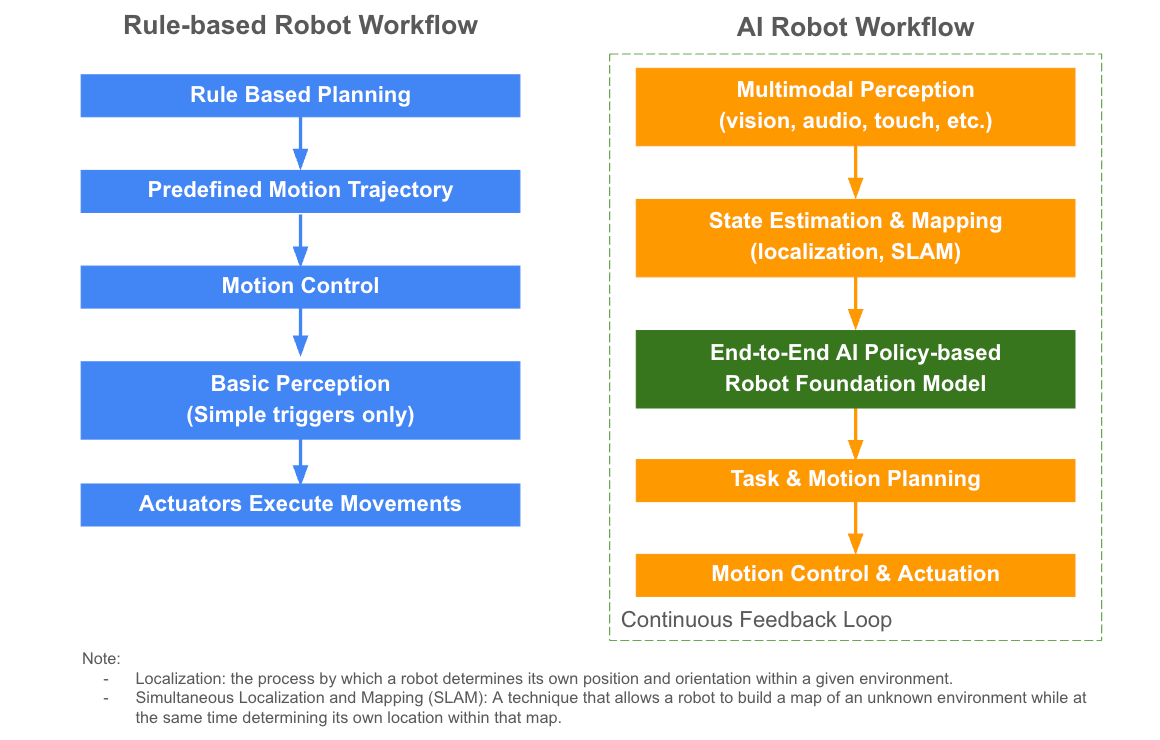
Les modèles fondamentaux s’invitent désormais dans le secteur. Mais les grands modèles généralistes de langage (LLM) ne suffisent pas seuls : les robots doivent percevoir, raisonner et agir dans des environnements physiques évolutifs. Ainsi, l’industrie développe des modèles robotiques de bout en bout, fondés sur des politiques. Les robots équipés de ces modèles peuvent :
- Percevoir : Intégrer des données électro-sensorielles multimodales (vision, audio, toucher)
- Planifier : Évaluer leur état interne, cartographier l’environnement, interpréter des instructions complexes : la perception mène directement à l’action, avec un minimum de configuration manuelle
Agir : Générer des plans de mouvement et produire des commandes de contrôle en temps réel
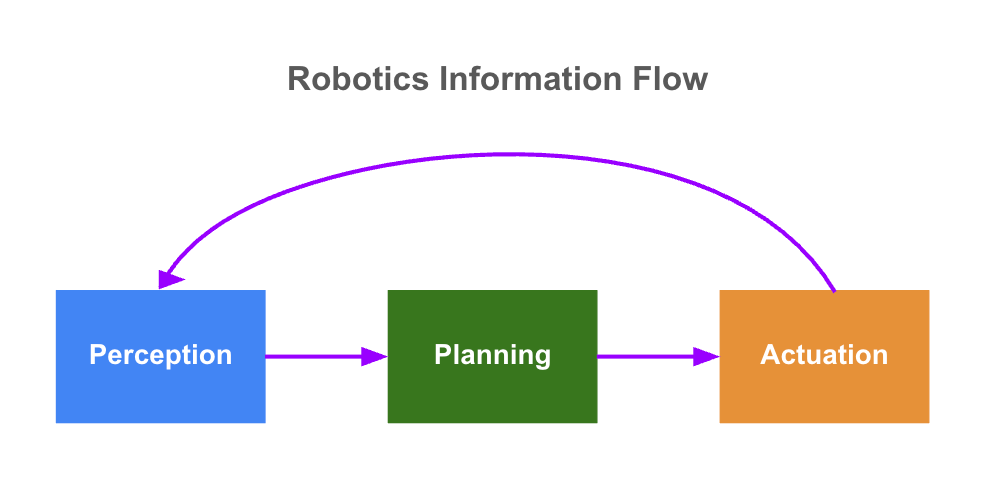
Ces modèles apprennent des « politiques » générales pour interagir avec leur environnement, rendant les robots plus intelligents, autonomes et capables de s’adapter à divers contextes. Les modèles avancés intègrent une boucle de rétroaction constante, améliorant leur capacité d’apprentissage et d’adaptation en milieu dynamique.
L’architecture phare actuelle est le modèle Vision-Langage-Action (VLA). Ces modèles relient les entrées sensorielles — principalement la vision et le langage naturel — à des actions robotiques, permettant de réagir à ce qui est « vu » ou « entendu » par des commandes adaptées. Parmi les références, on trouve Google RT-2, NVIDIA Isaac GR00T N1, π0 par Physical Intelligence (π).
Pour enrichir ces modèles, plusieurs approches complémentaires sont utilisées :
Modèles du monde : Ces modèles simulant des environnements physiques internes facilitent l’apprentissage complexe, la prévision et la planification. Google a notamment lancé Genie 3, capable de générer une variété inédite de mondes interactifs.
- Apprentissage par renforcement profond : Apprentissage de comportements par essais et erreurs.
- Téléopération : Contrôle à distance et production de données d’entraînement.
Apprentissage par imitation / Apprentissage par démonstration : Les robots acquièrent de nouvelles compétences en imitant des actions humaines.
Ci-dessous, une synthèse schématique de l’apport de ces approches aux modèles robotiques fondamentaux.
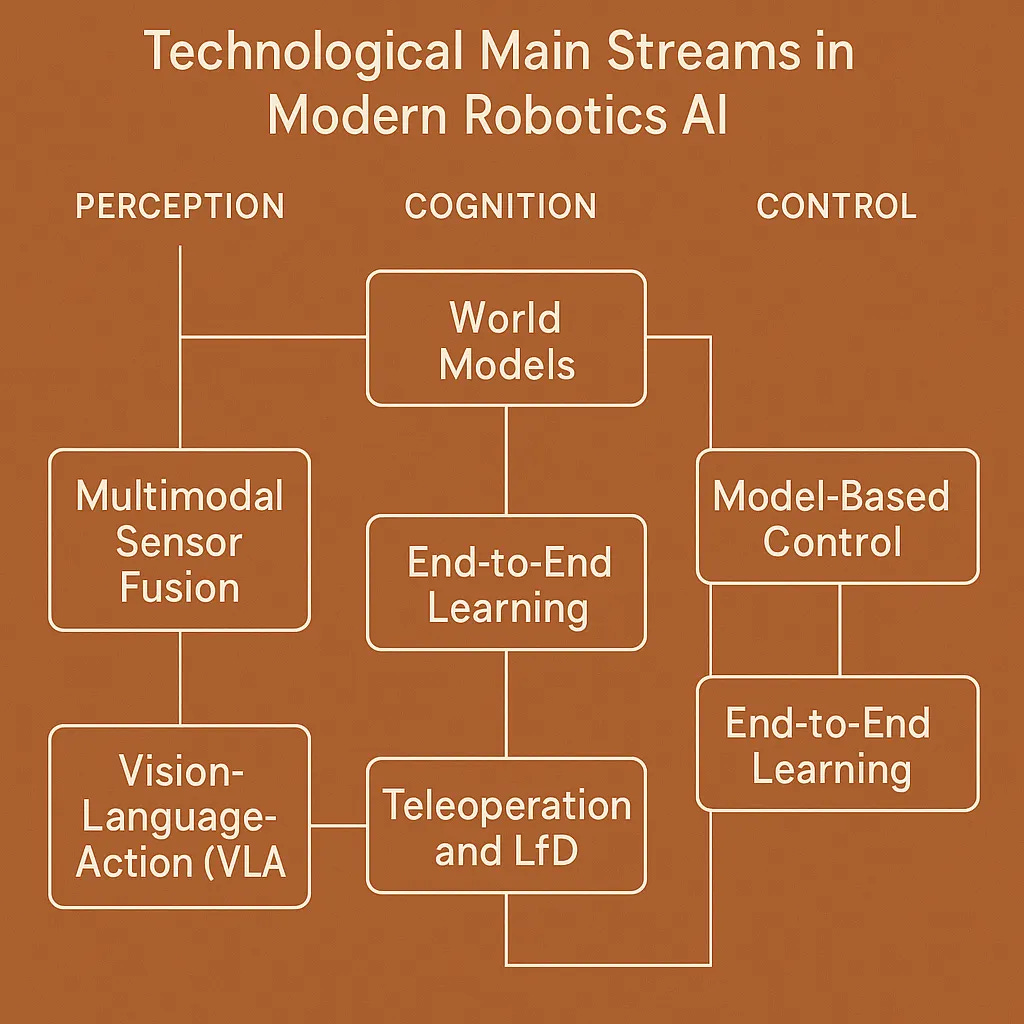
Source : Modèles du monde : le cœur de l’intelligence physique vers l’AGI
Des avancées open source telles que π0 par Physical Intelligence et NVIDIA Isaac GR00T N1 marquent une étape importante. Toutefois, la plupart des modèles fondamentaux robotiques restent propriétaires et fermés. Des entreprises comme Covariant, Tesla et d’autres conservent leurs codes et jeux de données pour des raisons d’intérêt économique.
Ce manque de transparence freine la coopération et l’interopérabilité, révélant le besoin de standards ouverts, d’une gouvernance communautaire sur chaîne et d’une interopérabilité entre incarnations robotiques. Cela encouragerait la confiance, la collaboration et un développement plus solide.
Couche données : L’intelligence du cerveau
Des jeux de données robotiques robustes reposent sur : volume, qualité, diversité.
En dépit d’efforts soutenus, les jeux de données actuels sont insuffisants. À titre d’exemple, GPT-3 (OpenAI) s’est entraîné sur 300 milliards de jetons, alors que le plus vaste jeu open source en robotique — Open X-Embodiment — recense à peine 1 million de trajectoires réelles pour 22 types de robots. On est loin de ce qui serait requis pour une généralisation robuste.
Des approches propriétaires, telles que les « usines de données » de Tesla où les opérateurs portent des combinaisons de capture de mouvement, permettent de collecter plus de mouvements humains réels, mais elles restent onéreuses, peu diverses et difficilement extensibles.
Trois principales sources de données sont mobilisées :
- Données Internet : Abondantes et extensibles, mais surtout observationnelles et privées de signaux sensorimoteurs. L’entraînement de grands modèles vision-langage (GPT-4V, Gemini…) sur ces jeux offre des bases visuelles et sémantiques utiles. L’annotation vidéo par labels cinématiques convertit aussi les séquences brutes en données d’entraînement utilisables.
- Données synthétiques : Générées par simulation, elles favorisent des expérimentations variées à grande échelle, mais ne reflètent pas totalement la complexité du réel — d’où l’écart simulation-réalité. Les chercheurs y pallient par adaptation de domaine (augmentation, randomisation, apprentissage adversarial) et par transfert simulation-réalité, avec affinement continu en situation réelle.
Données réelles : Rares, coûteuses, mais indispensables pour ancrer les modèles et combler l’écart simulation/déploiement. Les données de qualité incluent vues égocentriques (ce que le robot « voit ») et données de mouvement. Elles sont souvent récupérées via démonstration humaine ou téléopération (VR, capture de mouvement, enseignement kinesthésique), garantissant un apprentissage par exemples réels.
Des études montrent que combiner Internet, réel et synthétique augmente fortement efficacité et résilience des modèles, comparé à une source unique.
La quantité de données est utile, mais la diversité s’impose surtout pour généraliser à de nouveaux robots et tâches. Pour y parvenir, il faut des plateformes ouvertes, du partage collaboratif et des jeux de données entre incarnations robotiques pour des modèles plus puissants.
Couche agent : L’incarnation physique de l’IA
La robotique évolue vers des agents IA physiques autonomes capables d’agir dans le monde réel. Les avancées dépendent de modèles ajustés, d’apprentissage continu et d’adaptation réelle propre à chaque incarnation robotique.
Parmi les opportunités majeures :
- Apprentissage continu et infrastructures adaptatives : Systèmes permettant une amélioration constante grâce au retour d’expérience en temps réel et au partage d’expérience
- Économie d’agents autonomes : Robots opérant comme agents économiques indépendants, pouvant échanger des ressources (calcul, capteurs) sur des marchés entre robots et générer des revenus via la tokenisation des services
- Systèmes multi-agents : Plateformes et algorithmes pour coordonner, collaborer et optimiser des flottes de robots
La convergence IA robotique x Web3 : un marché d’envergure
À mesure que la robotique IA passe du laboratoire au réel, des obstacles structurels — centralisation des données et modèles, déficit de confiance et de traçabilité, contraintes de confidentialité et conformité, faible interopérabilité — freinent l’innovation et la montée en puissance des écosystèmes robotiques.
Problèmes majeurs de la robotique IA
Silos centralisés de données et de modèles
Les modèles robotiques requièrent des jeux de données massifs et variés. Aujourd’hui, leur production demeure centralisée, fragmentée et coûteuse, aboutissant à des systèmes peu adaptables. Les robots évoluant en environnement réel sous-performent faute de diversité des données et de robustesse des modèles.
Confiance, traçabilité et fiabilité
L’absence de registres transparents et vérifiables sur l’origine des données, l’entraînement des modèles et le fonctionnement des robots entrave la confiance et la responsabilité — obstacles majeurs à l’adoption par les utilisateurs, régulateurs et entreprises.
Confidentialité, sécurité et conformité
Les usages sensibles (santé, domotique…) requièrent des garanties strictes et le respect de réglementations, notamment en Europe (ex. RGPD). Les infrastructures centralisées peinent à garantir des collaborations IA sécurisées, limitant le partage des données et freinant l’innovation dans les milieux réglementés.
Scalabilité et interopérabilité
Les systèmes robotiques peinent à mutualiser ressources, apprendre en collaboration et s’intégrer sur des plateformes variées. Ces faiblesses fragmentent les effets réseau et ralentissent le transfert des compétences entre robots.
IA robotique & Web3 : solutions structurelles et nouveaux leviers d’investissement
Les technologies Web3 offrent des solutions de rupture en permettant des réseaux robotiques décentralisés, vérifiables, collaboratifs et respectueux de la vie privée. Cette convergence ouvre de nouveaux marchés à fort potentiel :
Développement collaboratif démocratisé : Réseaux incitatifs avec partage de données et co-développement des modèles et agents intelligents
- Traçabilité et conformité vérifiables : La blockchain garantit des registres immuables sur la provenance des données et modèles, les identités robotiques et l’historique opérationnel, essentiels pour la confiance et le respect réglementaire.
- Collaboration préservant la vie privée : Les solutions cryptographiques avancées permettent aux robots de co-entraîner des modèles et partager des insights sans dévoiler de données sensibles
- Gouvernance communautaire : Les organisations autonomes décentralisées (DAO) établissent des règles et politiques transparentes et inclusives sur chaîne pour piloter les opérations robotiques
- Interopérabilité entre incarnations robotiques : Les architectures blockchain ouvertes facilitent la coordination entre diverses plateformes robotiques, réduisant les coûts et accélérant le transfert de compétences
- Économie d’agents autonomes : L’infrastructure Web3 permet aux robots d’agir comme agents économiques indépendants, négociant et participant à des places de marché tokenisées sans intervention humaine
Réseaux physiques décentralisés (DePIN) : Le partage décentralisé des ressources (calcul, capteurs, stockage, connectivité) renforce la scalabilité et la résilience des réseaux robotiques
Quelques projets émergents illustrent le dynamisme du secteur. Ces exemples sont réservés à l’information et ne constituent pas un conseil financier.
Décentralisation de la donnée et du développement des modèles
Les plateformes Web3 démocratisent la collecte et le développement via des incitations pour les contributeurs (combinaisons de capture de mouvement, partage de capteurs, téléchargements visuels, annotation, génération de données synthétiques pour l’entraînement). Ce modèle permet de bâtir des jeux de données et des modèles plus variés et représentatifs que ce qu’une seule entreprise peut produire, tout en couvrant mieux les cas extrêmes essentiels dans des environnements imprévisibles.
Exemple :
Frodobots : Protocole de collecte participative pour recueillir des jeux de données réels via le jeu robotique. Leur initiative Earth Rovers a permis de lancer un robot de trottoir et un jeu mondial “Drive to Earn”, aboutissant au FrodoBots 2K Dataset, une base diverse de vidéos, données GPS, sons et contrôles humains, collectés sur environ 2 000 heures de robots téléopérés dans plus de 10 villes.
- BitRobot : Co-développé par FrodoBots Lab et Protocol Labs, plateforme incitative fondée sur Solana exploitant une architecture de sous-réseaux. Chaque sous-réseau constitue un défi ouvert ; les contributeurs sont récompensés en jetons pour soumission de modèles ou données, favorisant la collaboration mondiale.
- Reborn Network : Infrastructure essentielle pour l’écosystème des robots AGI. Propose la combinaison Rebocap permettant à chacun d’enregistrer et monétiser ses propres mouvements réels, contribuant à l’élaboration de jeux de données ouverts pour la robotique humanoïde avancée.
PrismaX : Infrastructure décentralisée garantissant diversité et authenticité des données par la mobilisation d’une communauté mondiale de contributeurs. Des mécanismes rigoureux de validation et d’incitation permettent la montée en charge de la donnée visuelle robotique.
Preuves de provenance et fiabilité
La blockchain assure la transparence et la responsabilité à chaque maillon de la chaîne robotique : traçabilité, authentification des identités et localisations, historique d’exploitation. La vérification collaborative, la réputation sur chaîne et la validation par mise sous séquestre garantissent la qualité des apports, préservant l’écosystème contre la donnée ou les modèles de mauvaise qualité.
Exemple :
OpenLedger : Infrastructure IA–blockchain pour l’entraînement et le déploiement de modèles spécialisés via des jeux de données communautaires. La preuve d’attribution garantit une récompense équitable pour les contributeurs de données de qualité.
Propriété, licence et monétisation par jetons
Les outils Web3 permettent la gestion par jetons de la propriété intellectuelle des jeux de données, modèles et capacités robotiques. Les contributeurs intègrent les conditions de licence directement dans leurs actifs via des contrats intelligents, garantissant le paiement automatique des redevances à chaque utilisation ou monétisation, et facilitant des marchés ouverts et justes.
Exemple :
Poseidon : Couche décentralisée de données bâtie sur Story Protocol, destinée à fournir des jeux de données légalement licenciés pour l’entraînement des IA.
Solutions préservant la vie privée
Les données générées dans des milieux sensibles (hôpitaux, hôtels, domiciles) sont difficilement accessibles publiquement, mais cruciales pour l’entraînement des modèles. Leur transformation en actifs sur chaîne via des solutions cryptographiques permet la traçabilité et la monétisation tout en préservant la confidentialité. Les environnements d’exécution sécurisés (TEE) et preuves à divulgation nulle de connaissance (ZKP) permettent un traitement sécurisé et une vérification sans exposition des données brutes, rendant possible l’entraînement de modèles IA sur des bases sensibles tout en respectant la confidentialité et la conformité réglementaire.
Exemple :
Phala Network : Permet le déploiement d’applications dans des TEE sécurisés pour un traitement confidentiel de l’IA et des données.
Gouvernance ouverte et responsable
L’entraînement robotique repose souvent sur des modèles propriétaires opaques. Une gouvernance transparente et vérifiable est cruciale pour limiter les risques et instaurer la confiance auprès des utilisateurs, régulateurs et entreprises. Les technologies Web3 rendent possible une gouvernance communautaire et ouverte sur l’intelligence robotique.
Exemple :
Openmind : Pile logicielle en libre accès IA permettant aux robots de penser, apprendre et collaborer. Ils ont proposé le standard ERC7777, visant à instaurer un écosystème robotique vérifiable, axé sur la sécurité, la transparence et la scalabilité. Il définit des interfaces pour la gestion des identités et des règles, l’enregistrement/suppression des participants, ainsi que leurs droits et responsabilités.
Conclusion
À l’aube de la convergence entre IA robotique et Web3, une nouvelle génération de systèmes autonomes, collaboratifs et adaptatifs émerge. Les prochaines années seront décisives pour concevoir des modèles IA plus riches, alimentés par des données réelles et coordonnées de façon décentralisée. L’émergence d’agents IA spécialisés dans l’hôtellerie, la logistique et bien d’autres secteurs ouvrira de nouvelles opportunités économiques.
Mais ce croisement entre IA robotique et crypto pose aussi des enjeux : équilibrer l’incitation des contributeurs sans créer d’abus, intégrer la diversité des incarnations robotiques, garantir la fiabilité réelle des solutions de confidentialité, et maîtriser l’évolution réglementaire pour rester conforme dans chaque région. Maîtriser ces risques et générer des rendements durables sera clé pour stimuler un progrès durable et l’adoption généralisée.
Restons attentifs et engagés : c’est ensemble que nous ferons avancer l’innovation et saisirons les opportunités de ce secteur en plein essor.
La robotique est un chemin d’innovation à parcourir collectivement :)
Merci enfin à Chain of Thought (Robotics & The Age of Physical AI) pour ses analyses éclairantes qui ont nourri ce travail.
Avertissement :
- Cet article est une republication à partir de [merakiki.eth]. Tous droits réservés à l’auteur initial [@merakikieth">merakiki]. Pour toute réclamation concernant la republication, veuillez contacter l’équipe Gate Learn qui interviendra rapidement.
- Avertissement de responsabilité : Les points de vue et opinions présentés dans cet article relèvent uniquement de l’auteur et ne constituent en aucun cas un conseil en investissement.
- Les traductions de cet article réalisées dans d’autres langues le sont par l’équipe Gate Learn. Sauf mention expresse, la reproduction, la distribution ou le plagiat de ces contenus sont strictement interdits.
Articles connexes

Qu'est-ce que les récits Crypto? Top récits pour 2025 (MISE À JOUR)

Qu'est-ce que Tars AI? Explorer le futur de l'IA et de l'intégration Web3

Tout ce que vous devez savoir sur GT-Protocole

Inventaire de 12 projets d'IA sur le sous-réseau Bittensor

Qu'est-ce qu'OpenLayer? Tout ce que vous devez savoir sur OpenLayer
