分散型ロボティック・インテリジェンスの新たなパラダイム
ロボットは長年、主に工場の整然とした環境で反復作業を担うなど、狭い範囲で特化してきました。しかし現在、AIがロボティクスの在り方を大きく変えつつあり、ロボットはユーザーの指示を理解・実行し、変化する環境に柔軟に適応できるよう進化しています。
世界規模でAIロボットの急速な普及が始まっています。Citiの予測によれば、2035年までに13億台のロボットが導入され、従来の工場から家庭やサービス業まで広がる見通しです。加えて、Morgan Stanleyはヒューマノイドロボット市場だけで2050年に5兆ドル規模へ成長すると見込んでいます。
この成長には膨大な市場機会がある一方で、中央集権化、信頼確保、プライバシー、スケーラビリティといった重大な課題もともないます。Web3技術は、分散型・検証可能・プライバシー保護・協調型ロボットネットワークの実現を通じて、これらの課題解決へ革新的なアプローチを提供します。
本記事では、進化し続けるAIロボティクスのバリューチェーンの全体像と、とりわけヒューマノイドロボット分野に注目し、AIロボティクスとWeb3技術の融合による新たな投資・事業機会を紹介します。
AIロボティクスのバリューチェーン
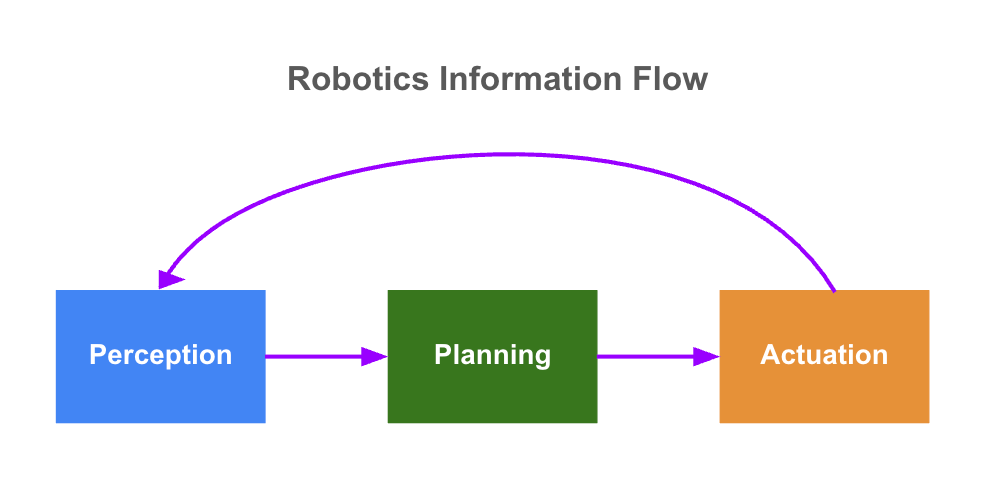
AIロボティクスのバリューチェーンは、ハードウェア、インテリジェンス、データ、エージェントの4層から成り立っています。各層が連携することで、ロボットは複雑な現実世界で「認知し」「推論し」「行動する」力を獲得しています。
近年、UnitreeやFigure AIなどによるハードウェア層の発展は著しいものの、高品質なデータ不足、汎用性のある基盤モデルの欠如、クロスエンボディメント(様々なロボット間)の相互運用性問題、信頼性あるエッジコンピューティングの課題など、非ハードウェア層での改善余地が大きく、今後はインテリジェンス・データ・エージェント層での進化がカギとなります。
ハードウェア層:「ロボットの体」
現代のロボットボディは、設計・導入がこれまで以上に容易になっています。現在、Tesla Optimus、Unitree G1、Agility Robotics Digit、Figure AI Figure 02など、100以上のヒューマノイドロボット製品が市場に存在します。
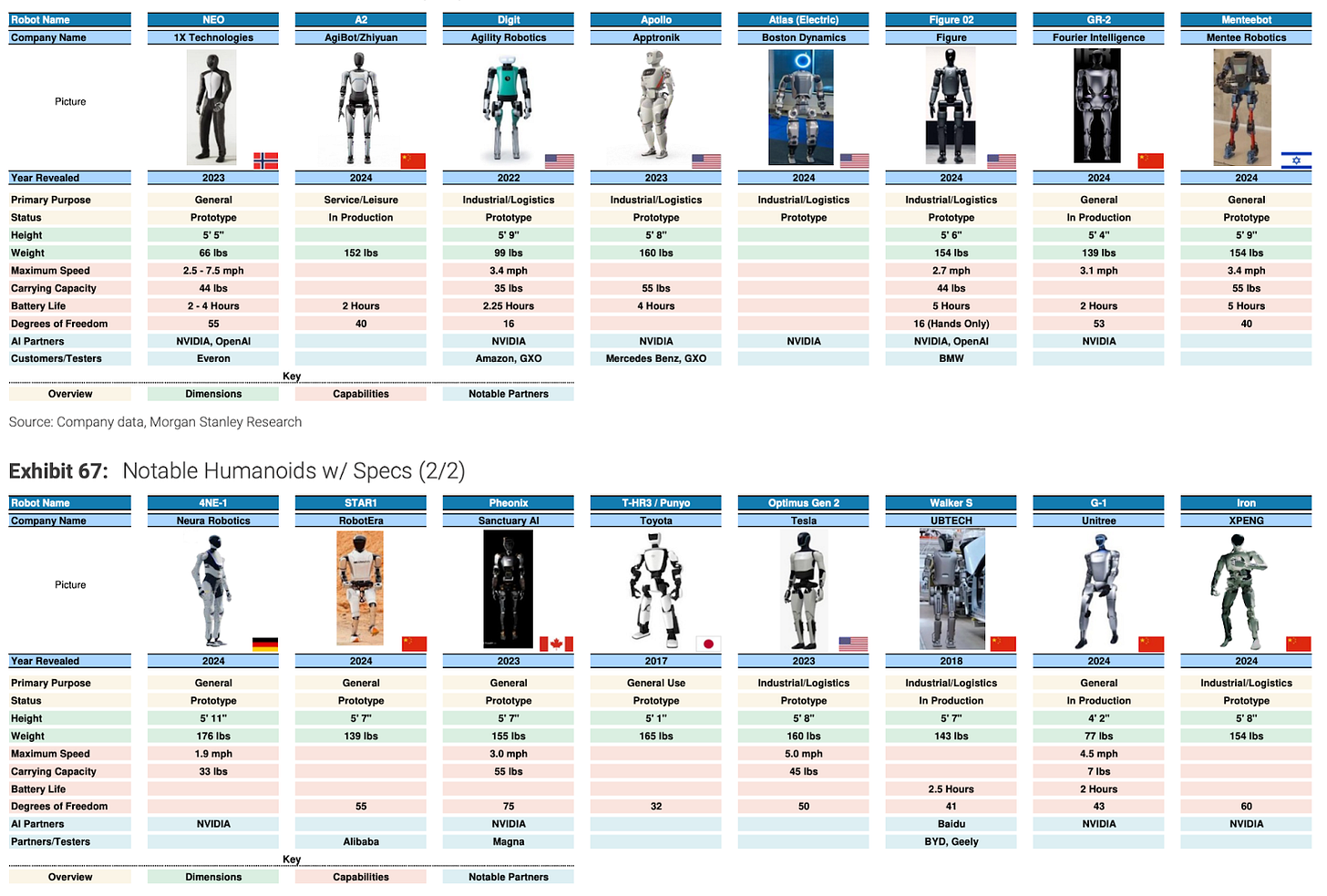
出典:Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
この進化は、以下3つの主要コンポーネントの技術革新が牽引しています:
- アクチュエータ:ロボットの「筋肉」に相当し、デジタル命令を精密な動作へ変換します。高速で高精度な電動モーター、繊細な作業に適したDielectric Elastomer Actuators(DEA)などの開発により、ロボットの器用さが飛躍的に向上しています。Tesla Optimus Gen 2(自由度22)、Unitree G1などは、人間並みの柔軟性や機動力を実現しています。
出典:Unitree最新ヒューマノイドロボットによるWAIC 2025でのボクシング試合
センサー:先端センサー技術によって、視覚・LIDAR/RADAR・触覚・音声など多様な環境情報を把握し、安全な移動や精緻な操作、状況認知が可能になっています。
組み込み型コンピューティング:デバイス内のCPU・GPU・AIアクセラレーター(TPUやNPU等)がセンサーデータをリアルタイム処理し、AIモデルによる自律判断を可能にします。低遅延·高信頼ネットワークでシームレスな協働ができ、エッジ・クラウドのハイブリッド構成によって演算負荷を最適化できます。
インテリジェンス層:「ロボットの脳」
ハードウェアの進歩に伴い、「ロボットの脳」となる強力な基盤モデルや高度な制御ポリシー構築に関心が移っています。
AI統合前は、ロボットはルールベースの固定動作に頼り、環境適応力がありませんでした。
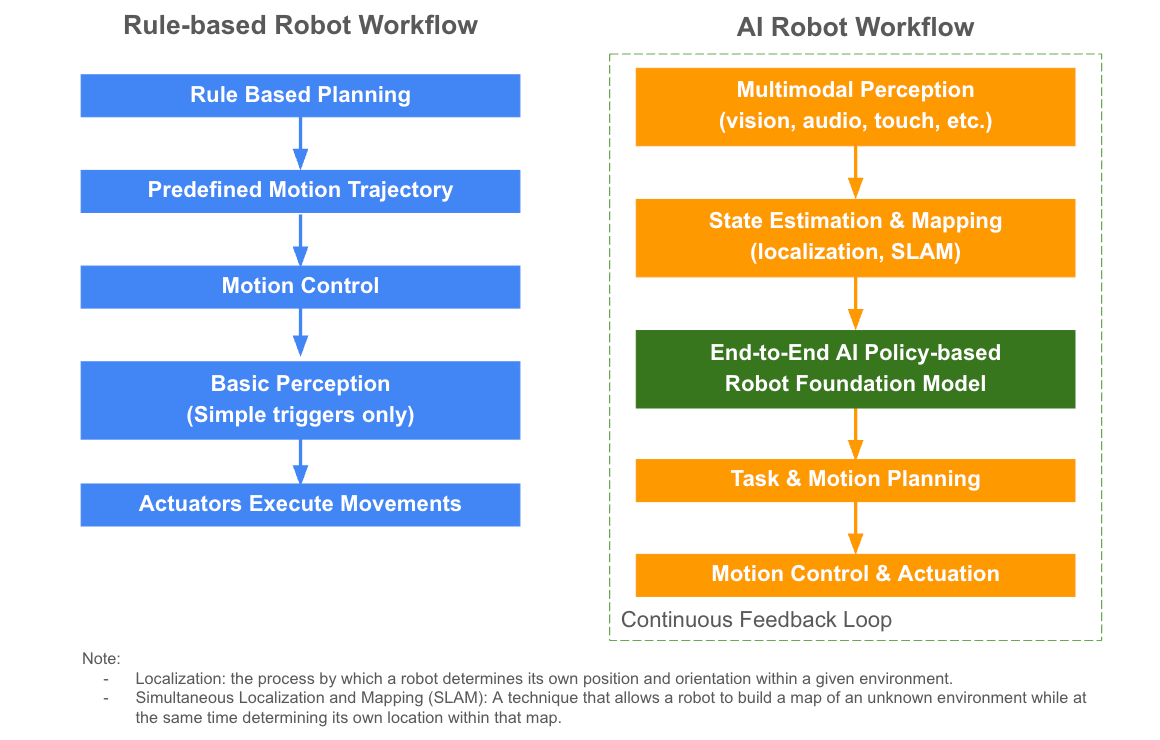
現在、ロボティクス分野へ基盤モデルの導入が進んでいます。ただし、一般の大規模言語モデル(LLMs)だけでは不十分であり、ロボットには物理環境で「認知・推論・行動」可能な知能が求められます。そのため、業界ではエンドツーエンド型の制御ポリシーを持つロボティクス基盤モデルの開発が進み、これによりロボットは以下を実現します:
- 認知:多様な生のセンサーデータ(視覚・音声・触覚など)を取り込む
- 計画:自己状態の推定、環境のマッピング、複雑な指示の解釈。認知から行動まで手動設計を最小化する
行動:動作計画を作成し、リアルタイムで制御命令を出す
これらモデルは広範なタスク適応・高度な知能・自律性を与える一般的な「行動ポリシー」を学習します。また、継続フィードバックを取り入れ、現場経験によるさらなる適応力向上も図られています。
主要なロボティクス基盤モデルアーキテクチャはVision-Language-Action Model(VLA)で、主に視覚データと自然言語指示を入力し、それをロボットの動作へ直接マッピングします。これによってロボットは「見たり」「聞いたり」した情報に即応する運動指令を生成します。代表例はGoogle RT-2、NVIDIA Isaac GR00T N1、Physical Intelligence πによるπ0などです。
これらモデル強化のため、次のような補完アプローチも統合されています:
ワールドモデル:物理環境の内部シミュレーションでロボットの複雑な行動・結果予測・行動計画を支援。GoogleのGenie 3などが多様なインタラクティブ環境生成を実現しています。
- 深層強化学習:試行錯誤による行動学習
- 遠隔操作(Teleoperation):リモート制御およびトレーニングデータの取得
模倣学習/デモからの学習(LfD):人の動作を真似してロボットに新しい技能を教える
以下は、これら手法がロボティクス基盤モデル構築にどう貢献するかの概略図です。
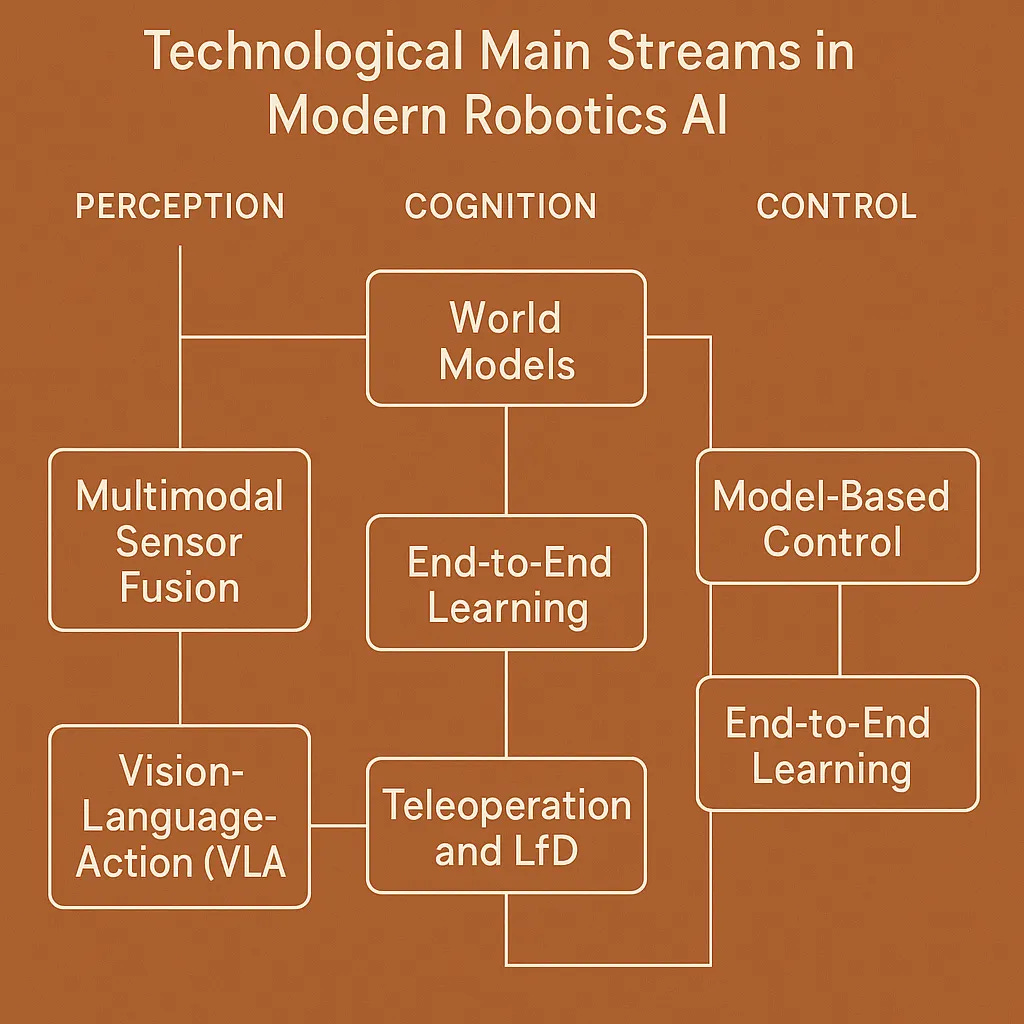
出典:World models: the physical intelligence core driving us toward AGI
最近のオープンソースでの進展、例えばPhysical Intelligence πによるπ0、NVIDIA Isaac GR00T N1などは大きな成果ですが、多くのロボティクス基盤モデルは依然として中央集権・非公開です。CovariantやTeslaなどは、オープン化インセンティブが乏しく、独自コードやデータセットを非公開のまま保有しています。
この透明性不足は、ロボティックプラットフォーム相互の連携・協力・運用性を妨げており、安全かつ公正なモデル共有、コミュニティ主導のオンチェーン規格、クロスエンボディメント層の必要性が高まっています。こうした仕組みが信頼・協調・堅牢性を高め、業界発展を後押しします。
データ層:「ロボットの知識」
高度なロボティクス・データセットは、量・質・多様性の三要素が柱です。
現状、ロボティクス分野のデータセット規模は依然として不足しています。例としてOpenAI GPT-3は3,000億トークンで訓練されていますが、最大のオープンソースロボティクスデータセットOpen X-Embodimentは、22ロボット・100万件強のトラジェクトリのみに留まり、強力な汎化には桁違いの規模を要します。
Teslaのようにモーションキャプチャスーツを活用したデータ工場で実世界動作データを収集する試みもありますが、コスト・多様性・規模化には限界があります。
こうした課題に対応するため、主に下記3種のデータソースが活用されています:
- インターネットデータ:膨大で拡張性は高い一方、主に観察情報でセンサーモーター信号に乏しい。GPT-4VやGeminiなどの大規模Vision-Languageモデルの事前学習データとして有用。動画に運動学ラベルを付けることで、生映像をトレーニングデータ化する手法も活用されています。
- 合成データ:シミュレーション生成による迅速な大規模実験や多様な状況の再現が可能ですが、「sim-to-realギャップ」により現実の複雑さには限界があります。ドメイン適応(拡張・ランダム化・敵対学習)やsim-to-real転送で現実の検証・微調整を繰り返します。
実世界データ:希少かつ高価ですが、現実適合やシミュレーションと運用現場のギャップ埋めに不可欠。高品質データにはエゴセントリック(一人称)視点や精密な運動・操作データが含まれ、大半は人によるデモ・遠隔操作(VR・モーションキャプチャ・体感指導等)で収集されます。
研究によれば、インターネット・実世界・合成データの併用が、単一ソース単独利用より効率・堅牢性を大幅に高めます。
データ量と並び、多様性は更に重要です。未知タスクや新種ロボットへの汎化力を高めるには、オープンデータプラットフォームや協調データ共有で、多様なロボットをカバーするクロスエンボディメント型データセット構築が必須です。
エージェント層:「フィジカルAIエージェント」
現実環境で自律的行動するフィジカルAIエージェントへの進化が加速しています。その発展には、モデルの精緻な微調整、継続的な学習、各ロボット固有の特徴に即したリアルタイム適応が不可欠です。
フィジカルAIエージェント進化を加速させる主要な可能性は以下の通りです:
- 継続学習・適応型インフラ:リアルタイムフィードバックと現場経験共有による能力向上
- 自律エージェント経済:ロボット同士が計算・センサーデータ等の資源取引を行い、トークン化サービスで収益を生む
- マルチエージェントシステム:複数ロボットが協調・連携・集団最適化する次世代アルゴリズムとプラットフォーム
AIロボティクスとWeb3の融合:巨大市場への道
AIロボティクスが実世界導入へ進む中、中央集権型データ・モデルの囲い込み、信頼・来歴の不透明さ、プライバシー・法令遵守・連携性の課題が、イノベーションと市場拡大の障害となっています。
AIロボティクスの主な課題
中央集権型データ・モデル囲い込み
現場ロボットは多様で膨大なデータを要しますが、既存の開発は中央集権・分断・高コストとなり、適応力の乏しいシステムを生みがちです。現実環境で展開されるロボットは、多様性不足やモデルの堅牢性不足から性能が低下するケースもあります。
信頼・来歴・信頼性
データ出自やモデル訓練履歴、ロボット運用の透明な記録がなく、ユーザー・規制・企業の採用障壁となっています。
プライバシー・セキュリティ・コンプライアンス
医療・家庭用など機微な用途では、厳しいプライバシー保護と地域法令(例:GDPR)遵守が必須です。中央集権型インフラでは安全な協調AIやデータ共有が難しく、イノベーションが阻害されます。
スケーラビリティ・相互運用性
ロボットシステムは資源共有・協調学習・多様なプラットフォーム間の連携が難しく、ネットワーク効果の分断や能力転送の停滞に繋がっています。
AIロボティクス×Web3:構造改革が投資機会を拡大
Web3技術は分散型・検証可能・プライバシー保護・協調型ネットワークの構築で、上記課題に直接対応し、新しい投資マーケットを創出します:
民主化・協調開発:インセンティブ型ネットワークでロボットがデータやモデル・知能エージェントを共有・発展させる
- 検証可能な来歴・説明責任:ブロックチェーンによりデータ・モデル系譜、ロボットID、運用履歴の不変記録を実現し、信頼性・法令遵守を向上
- プライバシー保護型協調:高度暗号技術で独自・機微データを公開せず共同学習・知見共有が可能
- コミュニティ主導ガバナンス:DAOによる透明・包括的なオンチェーン規則でロボット運用を監督
- クロスエンボディメント相互運用性:オープンなブロックチェーン基盤で多様なロボット間連携を容易にし、開発コスト低減・能力転送促進
- 自律エージェント経済:Web3基盤のロボットがP2P取引・交渉・トークン化マーケット参加を人手なしで実現
分散型物理インフラネットワーク(DePIN):ブロックチェーン上で計算・センサ・ストレージ・接続リソースをP2P共有し、ネットワークの拡張性・堅牢性を飛躍的に高めます
この領域の最新イノベーション例を以下に紹介します。なお、以下は情報提供のみを目的としており、投資助言ではありません。
分散型データ・モデル開発
Web3基盤プラットフォームは、モーションキャプチャ・センサー共有・画像アップロード・アノテーション・シミュレーション等、貢献者の多様な活動にインセンティブを付与し、データ・モデルの多様性増大と品質向上を実現します。分散型構造によって、予測困難な環境でのエッジケース対応力も高まります。
事例:
Frodobots:ロボットゲームを活用したクラウドソーシングで実世界データセットを収集。歩道ロボット「Earth Rovers」や「Drive to Earn」グローバルゲームを展開し、FrodoBots 2K Dataset(約2,000時間分・10都市以上の遠隔ロボット運転映像・GPS・音声・人間操作データ)を構築。
- BitRobot:Frodobots LabとProtocol Labsが開発。Solanaベースでサブネットごとにオープン課題を設定し、モデルやデータ提出でトークン報酬。グローバルな協働・オープンソースイノベーションを加速。
- Reborn Network: AGIロボットのオープンエコシステム基盤。Rebocapモーションキャプチャスーツで誰でも動作収録・収益化が可能。複雑ヒューマノイドロボットの発展に不可欠なオープンデータセット創出を促進。
PrismaX: 世界中の協力者による分散型インフラで、データ多様性・信頼性を確保。大規模ビジュアルデータの検証・報酬制度で、ロボティクスデータセットの拡張を実現。
来歴証明・信頼性確保
ブロックチェーン活用でロボティクス分野全体の透明性・説明責任を強化。データ・モデルの来歴検証、ロボットID・位置の認証、運用履歴・貢献者記録の明確化。協力検証・オンチェーン評価・ステーク型検証で品質を担保し、低品質・不正データ流入の防止にも有効です。
事例:
OpenLedger: コミュニティ所有データセットで特殊モデルのAIトレーニング・配布を可能とするAI×ブロックチェーン基盤。Proof of Attribution方式で、品質高いデータ提供者へ公正報酬。
トークン化ライセンス・収益化
Web3ネイティブIPツールでデータセット・機能・モデル・知能エージェントのライセンスをトークン化。スマートコントラクトによるライセンス条項埋め込みと自動ロイヤリティ支払いで、公平・透明な市場形成が可能に。
事例:
Poseidon: Story Protocol基盤・Storyチームインキュベートによる、AI訓練用ライセンスデータ提供のフルスタック分散型データレイヤ。
プライバシー保護型ソリューション
病院・ホテル・家庭等の高価値データは公開取得困難ですが、高性能モデル構築に重要な要素です。プライベートデータを暗号技術でオンチェーン資産化し、追跡・構成・収益化しつつプライバシーも守れます。Trusted Execution Environment(TEE)やZero-Knowledge Proofs(ZKP)技術で生データ非公開の安全演算が可能。これにより機微で分散型のデータもプライバシー・法令順守のもとAI学習に活用できます。
事例:
Phala Network: セキュアなTEE環境でAI・データ処理アプリを開発・運用可能。
オープン・説明責任型ガバナンス
従来のロボット訓練はブラックボックスで透明性や柔軟性に課題があります。Web3技術はオンチェーン・コミュニティ主導型の開発・監督でリスク管理・信頼獲得を促進します。
事例:
Openmind: ロボット同士の思考・学習・協働を可能にするオープンAIネイティブソフトウェア群。ERC7777標準案を提案し、人間・ロボットID管理、社会的ルール・参加登録・権利責任管理の統一規格化で、セキュリティ・透明性・拡張性重視のロボットエコシステム構築を目指します。
まとめ
AIロボティクスとWeb3の融合は、大規模な協働・柔軟な自律システムの新時代を切り拓きます。ハードウェア進化とともに、今後3~5年は現場データに裏付けられたより高度なAIモデルと分散型協働のカギとなるでしょう。ホスピタリティや物流など各産業で専門AIエージェントが普及し、新たな市場が拡大します。
一方でこの転換期には、インセンティブ設計の高度化、公平な報酬と搾取防止の両立、異種ロボット統合の技術的課題、機微データを扱う際の信頼性あるプライバシー保護策、急変する法規制対応など、多岐に渡るリスク管理や持続的収益モデルの構築が重要です。
今後も現場の変化を注視し、連携しながら拡大する市場で成長のチャンスを掴みましょう。
ロボティクスの進化は、仲間と共に歩む旅です
最後に、Chain of ThoughtのRobotics & The Age of Physical AIから得た有益な知見に感謝申し上げます。
免責事項:
- 本記事は[merakiki.eth]より転載しています。著作権は原著者[@merakikieth">merakiki]に帰属します。転載にご意見がある場合はGate Learn運営までご連絡ください。
- 免責事項:本記事の見解・意見は著者個人に属し、いかなる投資助言でもありません。
- 本記事の他言語翻訳はGate Learn運営によるものです。記載がない限り、翻訳記事の転載・配布・盗用は禁じます。
関連記事

VirtualsのAIXBTとは何ですか?AIXBTについて知る必要があるすべてのこと

Virtuals Protocol: AIエージェントのトークン化

Tars AIとは何ですか?AIとWeb3統合の未来を探る

クリプトナラティブとは何ですか?2025年のトップナラティブ(更新版)

OLAS: 10億人のAIエージェントへ
