Um Novo Paradigma para a Inteligência Robótica Descentralizada
Durante décadas, os robôs eram altamente especializados, dedicando-se principalmente a tarefas repetitivas em ambientes fabris estruturados. Hoje, a Inteligência Artificial está a transformar a robótica — permitindo que os robôs interpretem e executem instruções dos utilizadores e se adaptem a ambientes dinâmicos.
Estamos a entrar numa nova era de crescimento acelerado: a Citi estima que 1,3 mil milhões de robôs estarão implementados globalmente até 2035, expandindo-se para além das fábricas e chegando a lares e setores de serviços. Paralelamente, a Morgan Stanley prevê que o mercado de robótica humanoide por si só possa atingir 5 biliões $ até 2050.
Se, por um lado, esta rápida expansão revela um extraordinário potencial de mercado, por outro traz desafios significativos em torno da centralização, confiança, privacidade e escalabilidade. As tecnologias Web3 surgem como resposta transformadora, ao viabilizarem redes robóticas descentralizadas, verificáveis, colaborativas e com forte preservação da privacidade, respondendo diretamente a essas questões.
Nesta edição, iremos analisar a evolução da cadeia de valor da robótica com IA, focando especialmente os robôs humanoides, e identificar oportunidades diferenciadoras resultantes da convergência entre a robótica inteligente e as tecnologias Web3.
Cadeia de Valor da Robótica Inteligente
A cadeia de valor da robótica assente em IA compreende quatro camadas essenciais: Hardware, Inteligência, Dados e Agente. Cada camada sustenta as demais, permitindo aos robôs percecionar, raciocinar e atuar em ambientes complexos e imprevisíveis.
Nos últimos anos, assistimos a progressos relevantes na camada de hardware, liderados por pioneiros como Unitree e Figure AI. No entanto, persistem desafios críticos nas camadas não relacionadas com hardware — nomeadamente, a escassez de conjuntos de dados de qualidade, insuficiência de modelos fundacionais robustos e generalizáveis, fraca interoperabilidade entre diferentes morfologias robóticas e a necessidade de edge computing fiável. Por isso, hoje, as principais oportunidades de avanço concentram-se nas camadas de Inteligência, Dados e Agente.
Hardware: “O Corpo”
Atualmente, é mais simples do que nunca conceber e implementar “corpos robóticos” modernos. Existem já mais de 100 modelos distintos de robôs humanoides no mercado, incluindo o Optimus da Tesla, o G1 da Unitree, o Digit da Agility Robotics e o Figure 02 da Figure AI.
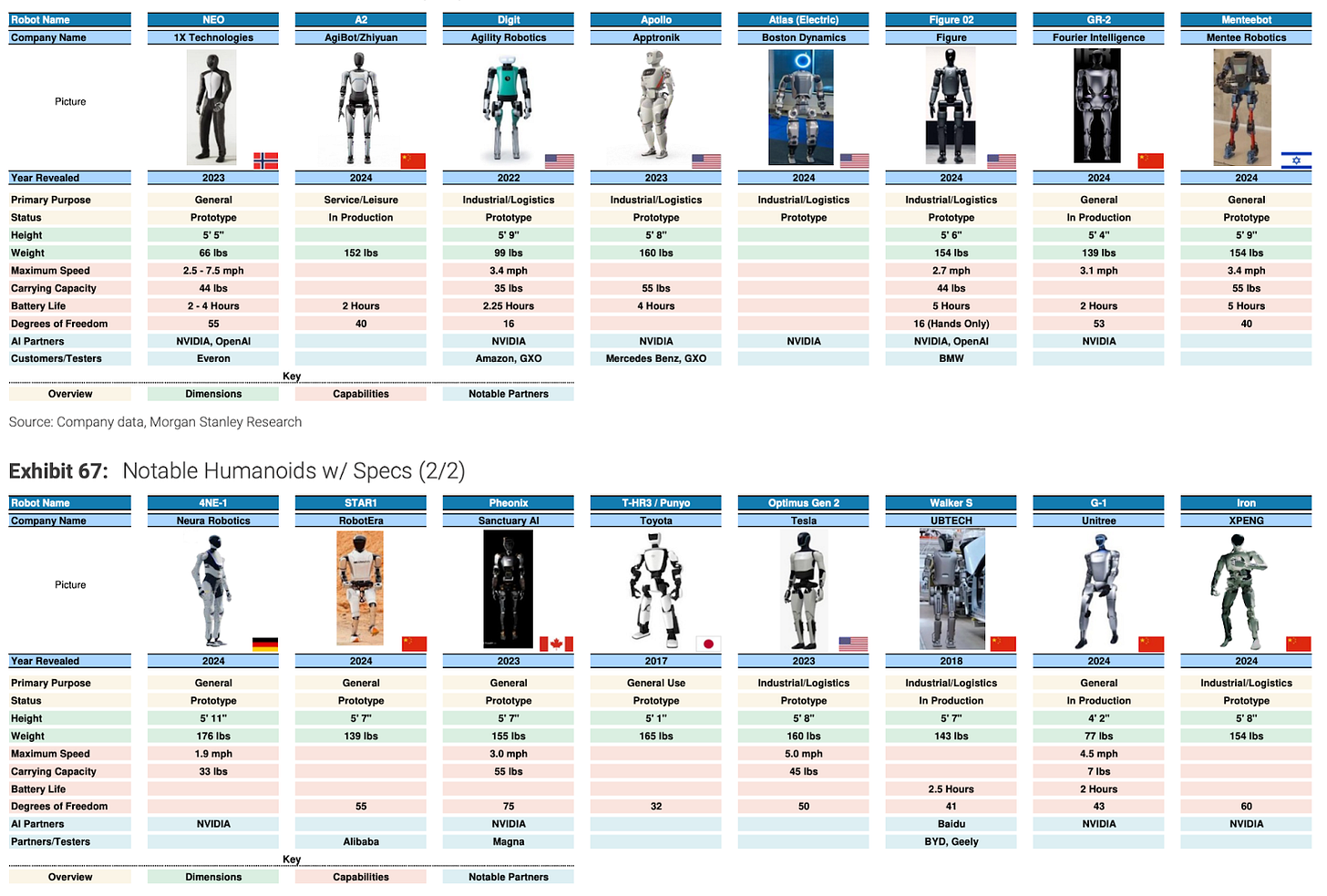
Fonte: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
Este avanço resulta da evolução de três componentes fundamentais:
- Atuadores: Os atuadores funcionam como “músculos” dos robôs, convertendo comandos digitais em movimentos de alta precisão. Inovações como motores eléctricos de elevado desempenho para movimentos rápidos e exatos, ou atuadores elastoméricos dieléctricos (DEA) para operações delicadas, melhoraram notavelmente a destreza. Isso vê-se em robôs como o Optimus Gen 2 da Tesla, com 22 graus de liberdade (DoF), e o G1 da Unitree — ambos revelando destreza quase humana e elevada mobilidade.
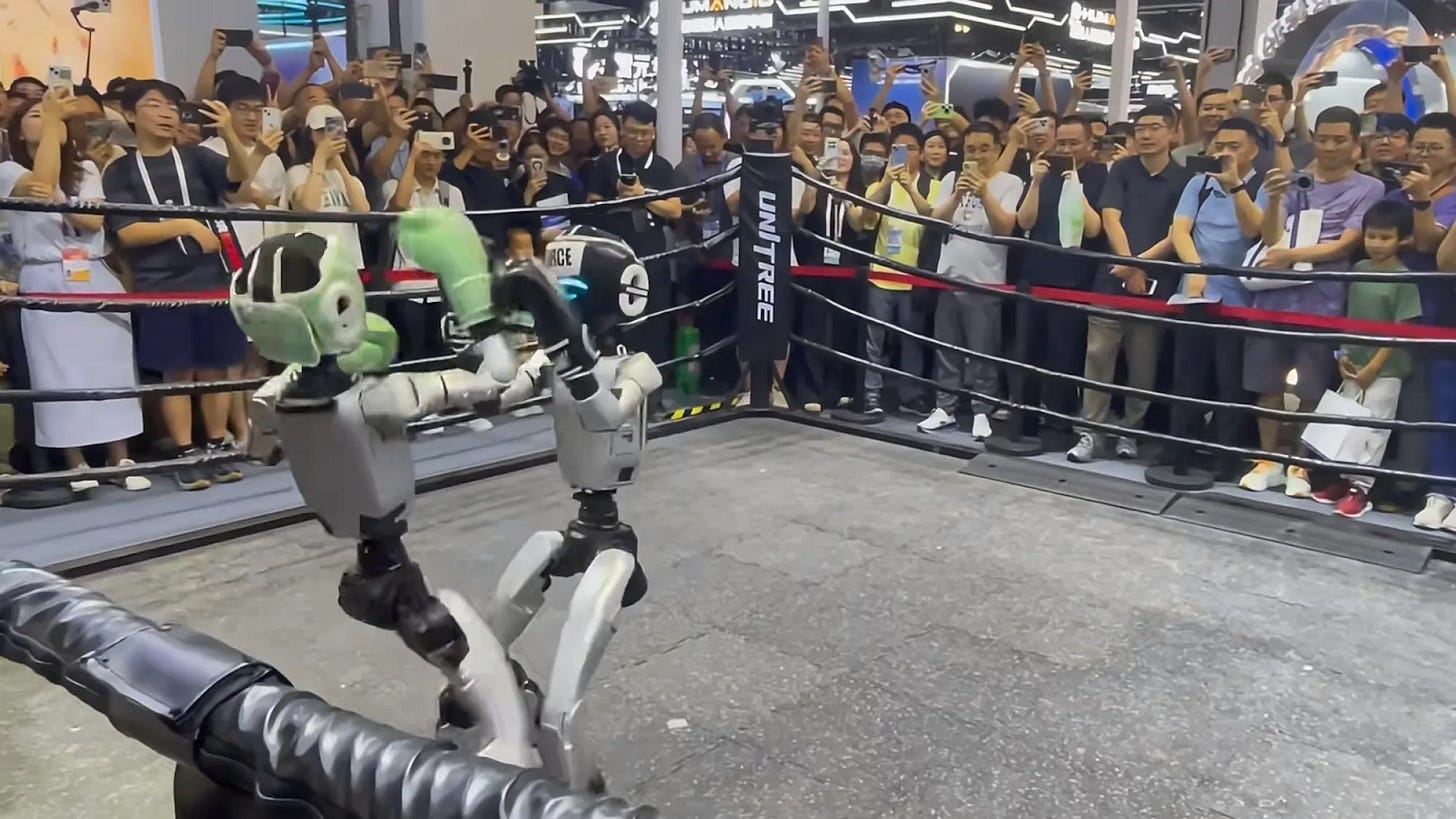
Fonte: Os mais recentes robôs humanoides da Unitree numa simulação de combate de boxe, WAIC 2025
Sensores: Sensores avançados conferem aos robôs a capacidade de percecionar e interpretar o meio envolvente através de inputs visuais, LIDAR/RADAR, táteis e de áudio. Estas tecnologias sustentam a navegação segura, manipulação precisa e consciência situacional.
Computação embutida: CPUs, GPUs e aceleradores de IA (como TPUs e NPUs) integrados realizam o processamento de dados dos sensores em tempo real, executando modelos de IA para decisões autónomas. A conectividade fiável e de baixa latência garante uma coordenação eficaz, enquanto arquiteturas híbridas edge–cloud permitem aos robôs delegar operações computacionais intensivas, conforme necessário.
Inteligência: “O Cérebro”
Com a maturação do hardware, o foco desloca-se para a criação do “cérebro robótico”: modelos fundacionais robustos e políticas de controlo avançadas.
Antes da chegada da IA, os robôs baseavam-se em automação por regras, com movimentos pré-programados e sem inteligência adaptativa.
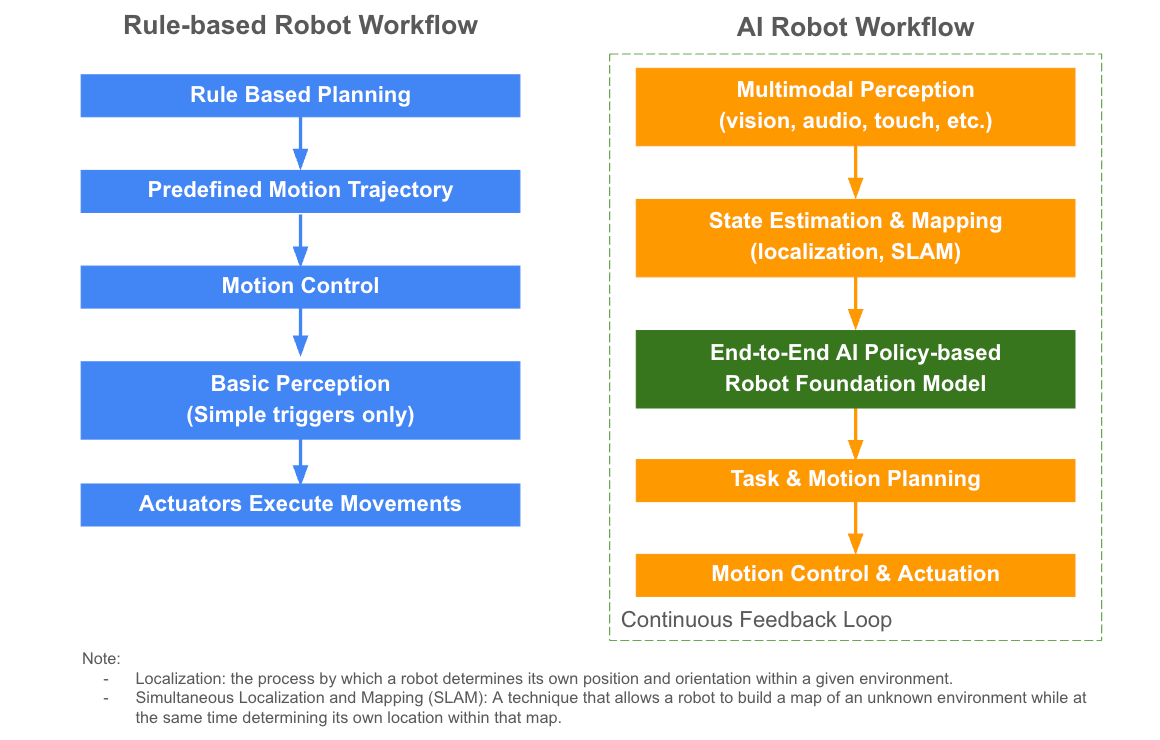
Estão agora a ser integrados modelos fundacionais na robótica. Porém, grandes modelos linguísticos generalistas (LLM) não bastam; os robôs têm de percecionar, raciocinar e agir em ambientes físicos dinâmicos. Para este efeito, a indústria está a investir no desenvolvimento de modelos fundacionais end-to-end baseados em políticas. Assim, os robôs conseguem:
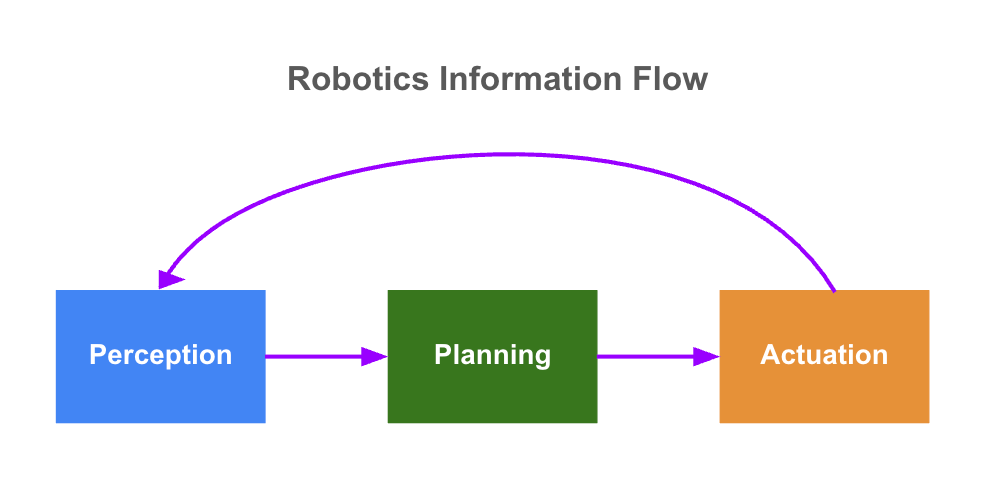
- Perceber: Assimilar dados brutos e multimodais dos sensores (visão, áudio, toque)
- Planear: Estimar o próprio estado, mapear o ambiente e interpretar instruções complexas — transferindo perceção diretamente para ação, com mínima engenharia manual
Agir: Gerar planos de movimento e emitir comandos de controlo para execução imediata
Estes modelos aprendem “políticas” gerais para interagir com o mundo, permitindo que os robôs se adaptem a múltiplas tarefas e atuem com inteligência e autonomia superiores. Os modelos mais avançados utilizam feedback contínuo, o que lhes permite aprender com a experiência e aperfeiçoar a adaptabilidade em contextos instáveis.
A arquitetura fundacional predominante nos modelos robóticos é atualmente o Vision-Language-Action Model (VLA). Estes modelos transferem entradas sensoriais — sobretudo dados visuais e instruções em linguagem natural — diretamente para ações robóticas, possibilitando respostas ajustadas ao que o robô “vê” e “ouve”. São exemplos de relevo o RT-2 da Google, o Isaac GR00T N1 da NVIDIA e o π0 da Physical Intelligence (π).
Para reforçar estes modelos, são integradas múltiplas abordagens complementares, entre as quais:
World Models: Criam simulações internas do ambiente físico, para que os robôs aprendam comportamentos complexos, antecipem consequências e planeiem ações. Destaca-se o lançamento, pela Google, do Genie 3, um modelo de mundo generalista capaz de gerar uma diversidade sem precedentes de ambientes interativos.
- Deep Reinforcement Learning: Permite aprender comportamentos por tentativa e erro.
- Teleoperação: Possibilita controlo remoto e fornecimento de dados de treino.
Learning from Demonstration (LfD) / Imitation Learning: Ensina novas competências através da imitação de ações humanas.
Segue uma ilustração panorâmica sobre o contributo destas abordagens para os modelos fundacionais robóticos.
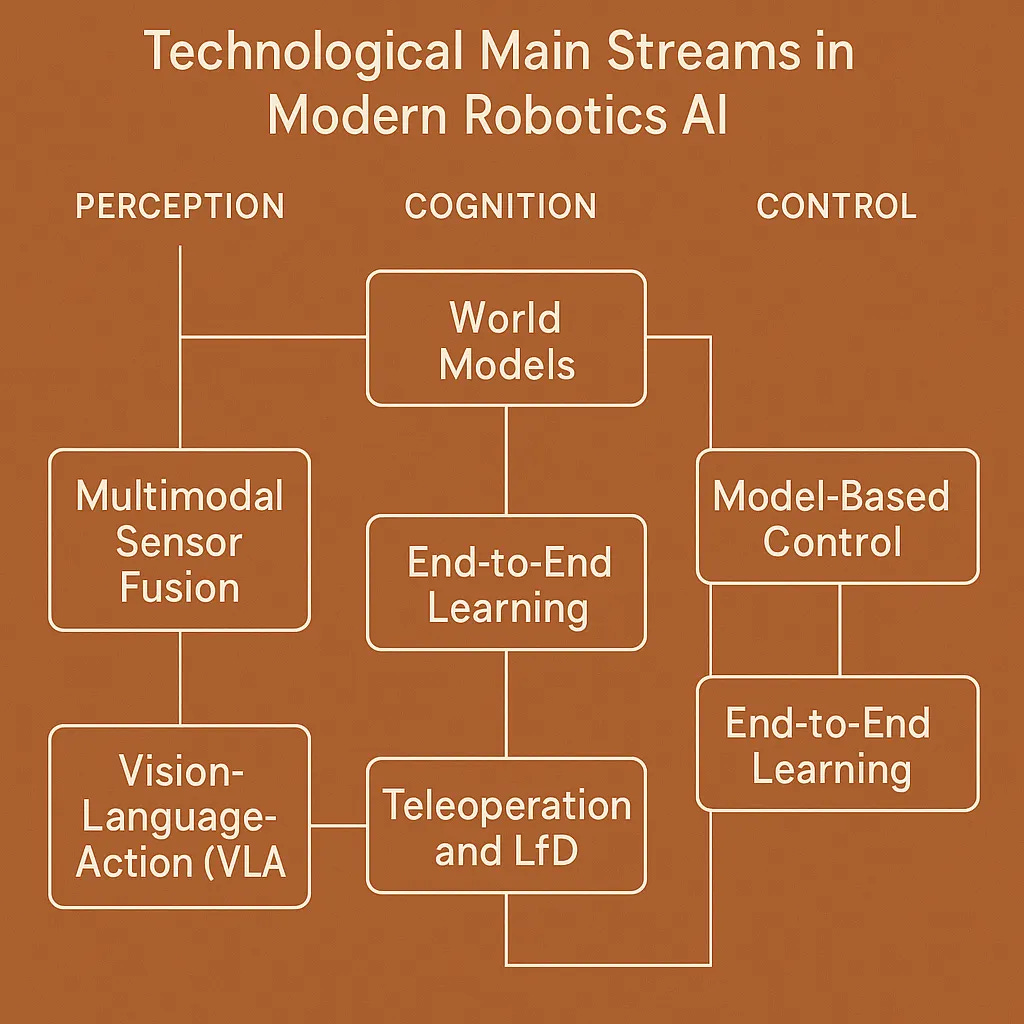
Fonte: World models: the physical intelligence core driving us toward AGI
Os recentes avanços open-source — como o π0 da Physical Intelligence (π) e o Isaac GR00T N1 da NVIDIA — assinalam progressos de relevo nesta área. No entanto, a maioria dos modelos fundacionais em robótica mantém-se centralizada e proprietária. Empresas como a Covariant, Tesla, entre outras, continuam a reter não só o código como os conjuntos de dados, sobretudo por escassez de incentivos à abertura.
Esta opacidade restringe a colaboração e a interoperabilidade entre plataformas robóticas — expondo a necessidade de partilha transparente e segura de modelos, standards comunitários on-chain e camadas de interoperabilidade entre diferentes morfologias. Tal promoveria confiança, cooperação e um desenvolvimento mais robusto em todo o setor.
Dados: O “Conhecimento do Cérebro”
Conjuntos de dados robustos para robótica assentam em três pilares: quantidade, qualidade e diversidade.
Apesar dos esforços atuais, os conjuntos de dados disponíveis continuam muito aquém da escala necessária. Por exemplo, o GPT-3 da OpenAI foi treinado com 300 mil milhões de tokens, enquanto o maior dataset open-source de robótica — Open X-Embodiment — inclui pouco mais de 1 milhão de trajetórias reais oriundas de 22 tipos de robôs. Isto é várias ordens de magnitude inferior ao necessário para garantir uma generalização robusta.
Modelos proprietários — como a abordagem da Tesla, que utiliza fábricas de dados onde operadores usam fatos de captura de movimento para gerar dados de treino — ajudam a recolher mais dados reais de movimento, mas permanecem dispendiosos, pouco diversificados e de difícil escalabilidade.
Para superar estes obstáculos, a robótica recorre a três fontes fundamentais de dados:
- Dados da Internet: Escaláveis e vastos, embora observacionais e carentes de sinais sensório-motores. O pré-treino de grandes modelos visão-linguagem (como o GPT-4V e Gemini) com estes dados fornece importantes referências semânticas e visuais. A anotação de vídeos com etiquetas cinemáticas pode ainda transformar gravações brutas em dados de treino acionáveis.
- Dados sintéticos: Gerados por simulação, facilitam experimentação rápida em larga escala e suportam cenários diversos, mas não captam integralmente a complexidade real — a conhecida “sim-to-real gap”. O desafio é superado através de técnicas de adaptação de domínio (aumento de dados, randomização de domínio, aprendizagem adversarial) e transferência sim-to-real, afinando os modelos com testes práticos sucessivos.
Dados reais: Apesar de escassos e onerosos, são indispensáveis para “ancorar” os modelos e colmatar o desfasamento entre simulação e aplicação. Os dados mais relevantes incluem perspetivas egocêntricas — mostrando o que o robô “vê” — e dados de movimento rigorosos. Estes dados são frequentemente recolhidos por demonstração humana ou teleoperação, recorrendo a dispositivos de captura de movimento, RV ou ensino cinestésico, para assegurar aprendizagem a partir de exemplos reais fiáveis.
Diversos estudos demonstram que combinar dados da Internet, sintéticos e do mundo real potencia significativamente a eficiência e robustez do treino dos robôs, face à dependência de uma única fonte.
Em paralelo, enquanto aumentar a quantidade de dados é importante, a diversidade é ainda mais crítica para generalizar a novas tarefas e morfologias robóticas. Alcançar tal diversidade exige plataformas de dados abertas e partilha colaborativa, incluindo a construção de conjuntos cross-embodiment, favorecendo modelos fundacionais mais abrangentes e resilientes.
Agente: O “IA Física Agente”
A transição para agentes físicos de IA — robôs autónomos no mundo real — está a acelerar. O progresso depende de modelos afinados, aprendizagem contínua e adaptação real a cada morfologia robótica.
Destacam-se várias oportunidades para impulsionar os agentes físicos de IA:
- Aprendizagem contínua e infraestruturas adaptativas: Sistemas que promovem o aperfeiçoamento contínuo dos robôs, através de ciclos de feedback em tempo real e partilha de experiências operacionais
- Economias de agentes autónomos: Robôs a funcionar como agentes económicos independentes — transacionando recursos como computação e dados sensoriais em marketplaces robot–robot e gerando valor por via de serviços tokenizados
- Sistemas multiagente: Novos algoritmos e plataformas que viabilizam coordenação, colaboração e otimização coletiva em frotas robóticas
A Convergência entre Robótica IA e Web3: Mercado com Potencial Imenso
À medida que a robótica IA passa do laboratório para o mundo real, vários bloqueios — silos centralizados de dados e modelos, gaps de confiança e proveniência, restrições de privacidade e conformidade, fraca interoperabilidade — dificultam a inovação e limitam a escalabilidade dos ecossistemas robóticos.
Principais Obstáculos na Robótica IA
Silos Centralizados de Dados e Modelos
Os modelos robóticos exigem datasets vastos e diversificados. Atualmente, o desenvolvimento de dados e modelos permanece centralizado, fragmentado e dispendioso, levando a sistemas pouco adaptáveis e isolados. Robôs aplicados em contextos dinâmicos apresentam resultados insatisfatórios devido à falta de diversidade de dados e à reduzida robustez dos modelos.
Confiança, Proveniência e Fiabilidade
A inexistência de registos transparentes e auditáveis da origem dos dados, treino dos modelos e operação dos robôs mina a confiança e a responsabilização — fatores essenciais à adoção por parte de utilizadores, reguladores e empresas.
Privacidade, Segurança e Conformidade
Aplicações sensíveis — como saúde e robótica doméstica — exigem elevados padrões de privacidade e total conformidade regulatória, sobretudo em regiões como a Europa (e.g., RGPD). As infraestruturas centralizadas têm dificuldade em garantir colaboração segura e respeitadora da privacidade, restringindo a partilha de dados e travando a inovação em setores sensíveis.
Escalabilidade e Interoperabilidade
Sistemas robóticos enfrentam desafios substanciais ao nível da partilha de recursos, aprendizagem colaborativa e integração entre diferentes plataformas e morfologias. Estas limitações fragmentam os efeitos de rede e atrasam a transferência de capacidades entre robôs distintos.
Robótica IA x Web3: Soluções Estruturais e Oportunidades de Investimento
As tecnologias Web3 respondem de forma estrutural a estes problemas, ao viabilizarem redes robóticas descentralizadas, verificáveis, colaborativas e que preservam a privacidade. Desta convergência emergem novos mercados investíveis:
Desenvolvimento colaborativo democratizado: Redes baseadas em incentivos onde os robôs partilham dados e desenvolvem coletivamente modelos e agentes inteligentes
- Proveniência e responsabilização verificáveis: A blockchain assegura registos imutáveis da origem dos dados e modelos, identidade robótica e historial operacional — fundamentais para confiança e conformidade.
- Colaboração preservando a privacidade: Soluções criptográficas avançadas permitem aos robôs treinar modelos conjuntos e partilhar informação sem expor dados sensíveis ou proprietários
- Governança orientada pela comunidade: Organizações Autónomas Descentralizadas (DAO) criam regras e políticas on-chain transparentes, para regular e monitorizar a atividade robótica
- Interoperabilidade entre morfologias: Estruturas abertas baseadas em blockchain promovem a coordenação entre diferentes plataformas robóticas, reduzindo custos de desenvolvimento e acelerando a transferência de competências
- Economias de agentes autónomos: A infraestrutura Web3 capacita robôs para atuarem como agentes económicos independentes, negociando e participando autonomamente em mercados tokenizados
Redes descentralizadas de infraestrutura física (DePIN): A partilha peer-to-peer, suportada por blockchain, de recursos de computação, sensores, armazenamento e conectividade potencia a escalabilidade e a robustez das redes robóticas
Apresentam-se alguns projetos recentes ilustrativos da dinâmica e inovação deste setor. Como sempre, esta informação tem caráter meramente informativo e não constitui aconselhamento financeiro.
Desenvolvimento descentralizado de dados e modelos
As plataformas Web3 democratizam estes processos ao recompensar colaboradores — seja através de fatos de captura de movimento, partilha de sensores, uploads visuais, anotação ou mesmo geração de dados sintéticos para simulação e treino de modelos. Este enfoque permite criar datasets e modelos muito mais ricos, diversificados e representativos do que qualquer empresa individual conseguiria. Estruturas descentralizadas também melhoram a cobertura de casos-limite — vital para robótica em ambientes imprevisíveis.
Exemplo:
Frodobots: Protocolo para recolha colaborativa de datasets reais por meio de gaming robótico. Lançaram o Earth Rovers, robô de passeio, e o jogo global “Drive to Earn”. Este projeto permitiu criar o FrodoBots 2K Dataset: uma coleção diversificada de imagens, dados GPS, registos áudio e dados de controlo humano, recolhidos em cerca de 2 000 horas de teleoperação de robôs em mais de 10 cidades.
- BitRobot: Desenvolvido em parceria pela FrodoBots Lab e Protocol Labs, é uma plataforma incentivada por criptoativos, baseada em Solana, assente numa arquitetura de sub-redes. Cada sub-rede corresponde a um desafio aberto, no qual os colaboradores podem submeter modelos ou dados para ganhar recompensas em tokens, fomentando a participação ativa e a melhoria continuada.
- Reborn Network: Infraestrutura base para o ecossistema aberto de robôs AGI. A solução Rebocap permite a qualquer utilizador registar e rentabilizar movimentos reais, alimentando datasets abertos fundamentais para a robótica humanoide avançada.
PrismaX: Infraestrutura descentralizada que assegura diversidade e autenticidade de dados, mobilizando uma comunidade global de colaboradores. Estabelece mecanismos robustos de validação e incentivo para dados visuais em larga escala, promovendo o crescimento sustentável dos datasets robóticos.
Prova de proveniência e fiabilidade
A tecnologia blockchain assegura transparência e responsabilização em toda a cadeia robótica. Garante origem verificável de dados e modelos, autentica identidades robóticas e localizações, bem como mantém registos claros de operação e contributos individuais. Adicionalmente, a verificação colaborativa, os sistemas de reputação on-chain e a validação baseada em staking garantem a qualidade dos dados e modelos, protegendo o ecossistema de inputs fraudulentos ou de baixo valor.
Exemplo:
OpenLedger: Infraestrutura AI-blockchain para treino e deployment de modelos especializados, baseados em datasets comunitários. Utiliza o Proof of Attribution para recompensar de forma justa os colaboradores de dados de qualidade.
Propriedade, licenciamento e monetização tokenizados
Ferramentas Web3 de PI permitem o licenciamento tokenizado de datasets, capacidades robóticas, modelos e agentes inteligentes. É possível incorporar termos de licenciamento em ativos digitais via smart contracts, assegurando pagamentos automáticos de royalties sempre que esses ativos sejam reutilizados ou monetizados. Este modelo facilita o acesso transparente e sem barreiras e potencia mercados abertos e justos para dados e modelos de robótica.
Exemplo:
Poseidon: Camada de dados descentralizada full-stack, baseada no Story Protocol centrado em PI e incubada pela equipa Story, concebida para fornecer dados de treino licenciados legalmente para IA.
Soluções de preservação da privacidade
Dados valiosos, como os gerados em hospitais, quartos de hotel ou lares, são de difícil obtenção pública, mas proporcionam contexto crucial para aumentar o desempenho dos modelos fundacionais. Converter dados privados em ativos on-chain, recorrendo a soluções criptográficas, torna-os rastreáveis e rentáveis, protegendo sempre a privacidade. Tecnologias como Trusted Execution Environments (TEE) e Zero-Knowledge Proofs (ZKP) permitem o processamento seguro e a verificação de resultados sem exposição dos dados brutos. Usar estas ferramentas permite treinar modelos de IA sensíveis e distribuídos, respeitando a privacidade e os regulamentos.
Exemplo:
Phala Network: Permite aos programadores lançarem aplicações em TEE seguras para processamento confidencial de dados e IA.
Governança aberta e responsável
O treino de robôs assenta frequentemente em sistemas proprietários opacos, pouco transparentes e inflexíveis. Uma governança transparente e verificável é essencial para mitigar riscos e fortalecer a confiança de utilizadores, reguladores e empresas. As tecnologias Web3 tornam possível a supervisão comunitária on-chain e o desenvolvimento colaborativo de inteligência robótica open-source.
Exemplo:
Openmind: Stack de software AI nativo open, que permite aos robôs pensar, aprender e cooperar. Propôs recentemente o standard ERC7777, com o objetivo de criar um ecossistema robótico verificável, baseado em regras, focado na segurança, transparência e escalabilidade. Define interfaces padronizadas para gerir identidades humanas e robóticas, aplicar regras societais e governar o registo e remoção de participantes, bem como os respetivos direitos e responsabilidades.
Consideração Final
Olhando para o futuro, a convergência entre robótica com IA e Web3 inaugura uma nova era de sistemas autónomos capazes de colaboração e adaptação em larga escala. Com rápidas inovações no hardware, os próximos 3–5 anos serão decisivos para criar modelos de IA mais capazes, baseados em datasets reais mais ricos e em coordenação descentralizada. Espera-se o surgimento de agentes de IA especializados em setores como hotelaria, logística, entre outros, dando origem a novas oportunidades de mercado de grande expressão.
No entanto, embora a convergência entre robótica inteligente e cripto seja entusiasmante, a transição também implica desafios. Desenhar mecanismos de incentivo equilibrados e eficientes continua a ser uma tarefa complexa e em evolução, exigindo que se recompensem de forma justa os contribuintes sem permitir abusos. A complexidade técnica é outro desafio, obrigando a soluções escaláveis e sólidas para integrar diferentes morfologias robóticas. As soluções para privacidade devem ser verdadeiramente fiáveis para merecer a confiança dos stakeholders, especialmente quando tratam dados sensíveis. Acresce uma constante evolução do enquadramento regulatório, o que obriga a uma navegação cautelosa entre jurisdições. Ultrapassar estes riscos e garantir retorno sustentável é essencial para o progresso e a adoção global.
Mantenhamo-nos atentos e participativos nestes desenvolvimentos — em conjunto, é possível impulsionar o progresso e captar as novas oportunidades neste mercado em forte expansão.
A inovação em robótica é uma viagem que só faz sentido em comunidade :)
Por último, agradeço à Chain of Thought (em particular ao artigo Robotics & The Age of Physical AI) os valiosos contributos para esta análise e investigação.
Aviso Legal:
- Este artigo foi republicado a partir de [merakiki.eth]. Todos os direitos de autor pertencem ao autor original [@merakikieth">merakiki]. Caso haja objeções a esta republicação, contacte a equipa Gate Learn, que dará seguimento com a maior brevidade possível.
- Isenção de Responsabilidade: As opiniões e perspectivas expressas neste artigo pertencem exclusivamente ao seu autor e não constituem qualquer tipo de aconselhamento de investimento.
- As traduções deste artigo para outros idiomas são realizadas pela equipa Gate Learn. Exceto indicação em contrário, é proibida a cópia, redistribuição ou plágio dos artigos traduzidos.
Artigos relacionados

O que são Narrativas Cripto? Principais Narrativas para 2025 (ATUALIZADO)

Explorando o Smart Agent Hub: Sonic SVM e seu Framework de Escalonamento HyperGrid

Como os Agentes de IA Impulsionarão a Cripto no Mercado Principal

Qual plataforma constrói os melhores agentes de IA? Testamos o ChatGPT, Claude, Gemini e outros

Tudo o que precisa de saber sobre GT-Protocolo
